Yifei Zhang | 张逸飞I am a first-year Ph.D. student in Computer Science at Carnegie Mellon University, advised by Prof. Max Simchowitz. Previously, I completed my undergraduate studies at the University of Chinese Academy of Sciences (UCAS). I was also a visiting research scholar at the Berkeley AI Research (BAIR) Lab, where I worked with Dr. Qianqian Wang under the guidance of Prof. Angjoo Kanazawa and Prof. Alexei (Alyosha) Efros, and collaborated closely with Prof. Masayoshi Tomizuka. My prior experience also includes an internship at the Institute for AI Industry Research (AIR), Tsinghua University, where I was advised by Prof. Hao Zhao. |

|
ResearchI'm interested in building learning systems that are reliable in the real world—systems that can continuously learn from experience and adapt as the world changes. More concretely, I'm drawn to problems in representation learning, online adaptation, and active learning, motivated by a simple question: can we enable models to learn effectively from ongoing experience, in a way that resembles how humans learn? Selected works are listed below (*equal contribution). |
|
Continuous 3D Perception Model with Persistent StateQianqian Wang*, Yifei Zhang*, Aleksander Holynski, Alexei A Efros, and Angjoo Kanazawa CVPR 2025 Oral arxiv / code / website / A new framework for reasoning about the 3D world in an online, sequential manner. Given an input image stream, our method simultaneously updates an inner state with the current observation and reads from it to make predictions of 3D geometry & camera pose for the current view, as well as infer unseen portions of the scene. |
|
Sparse Diffusion Policy: A Sparse, Reusable, and Flexible Policy for Robot LearningYixiao Wang*, Yifei Zhang*, Mingxiao Huo*, Ran Tian, Xiang Zhang, Yichen Xie, Chenfeng Xu, Pengliang Ji, Wei Zhan, Mingyu Ding, and Masayoshi Tomizuka CoRL 2024 arxiv / code / website / We propose a Sparse Diffusion Policy (SDP) that integrates a Mixture of Experts module specifically designed for multitask learning, continual learning and rapid adaptation to new tasks. |
|
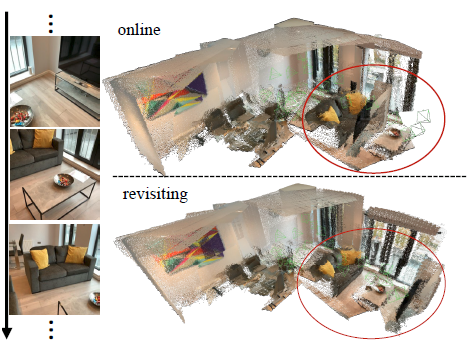
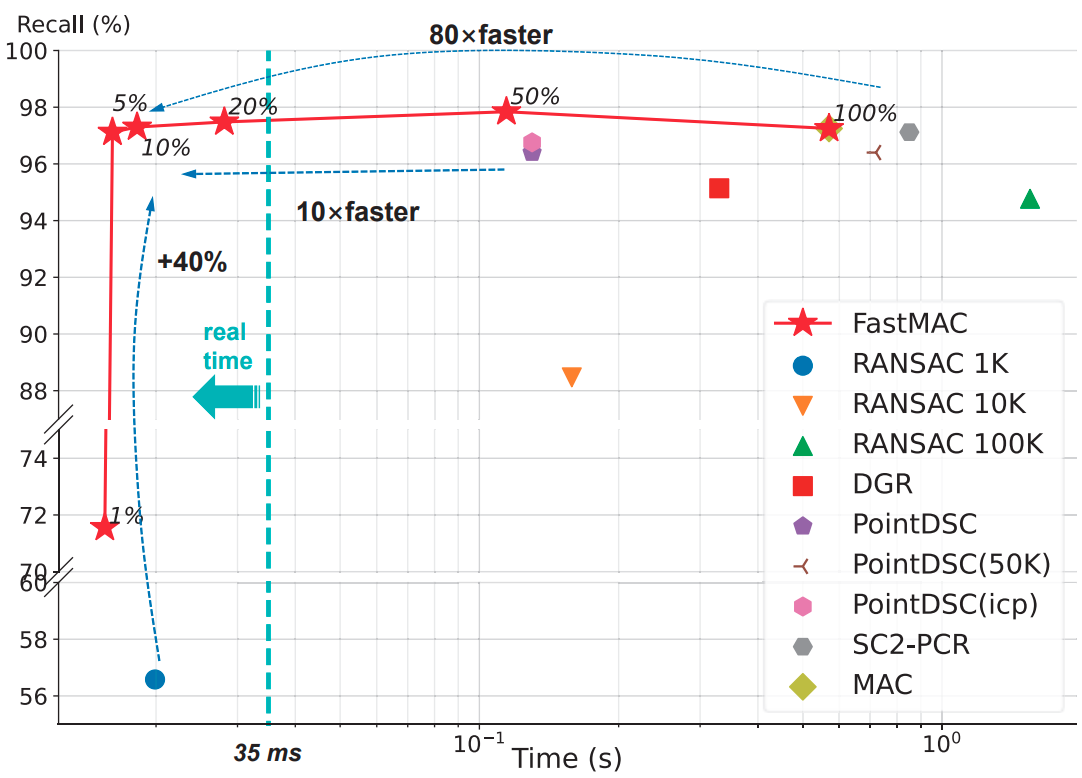
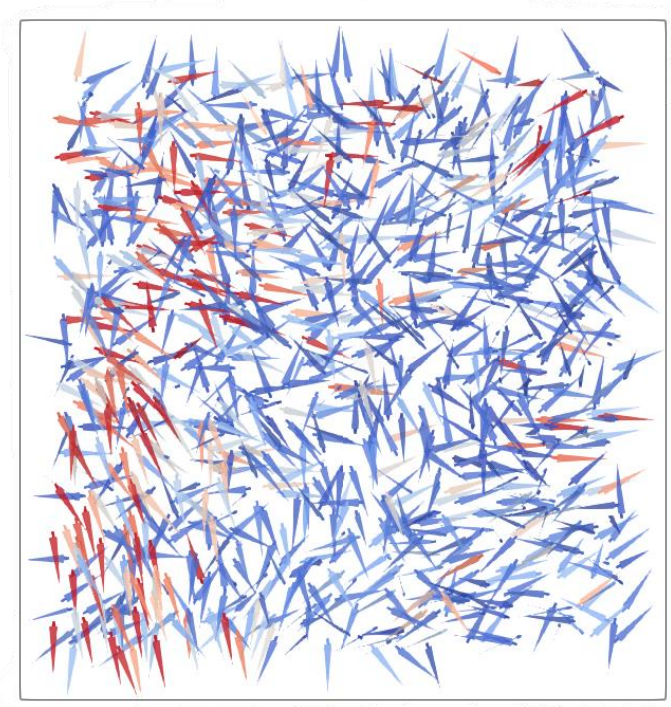
FastMAC: Stochastic Spectral Sampling of Correspondence GraphYifei Zhang, Hao Zhao, Hongyang Li, and Siheng Chen CVPR 2024 arxiv / code / We propose a new technique of stochastic spectral sampling of correspondence graph and build a complete 3D registration pipeline that reaches real-time speed while leading to little to none performance drop. |
|
Dual-frame Fluid Motion Estimation with Test-time Optimization and Zero-divergence LossYifei Zhang, Huan-ang Gao, Zhou Jiang, and Hao Zhao NeurIPS 2024 arxiv / code / A new fluid motion tracking method that is completely self-supervised and notably outperforms its supervised counterparts while requiring only 1% of the training samples (without labels) used by previous methods. |
Selected Honors and Awards |
|
Designed based on Jon Barron's website |